Dobb·E
About Dobb·E
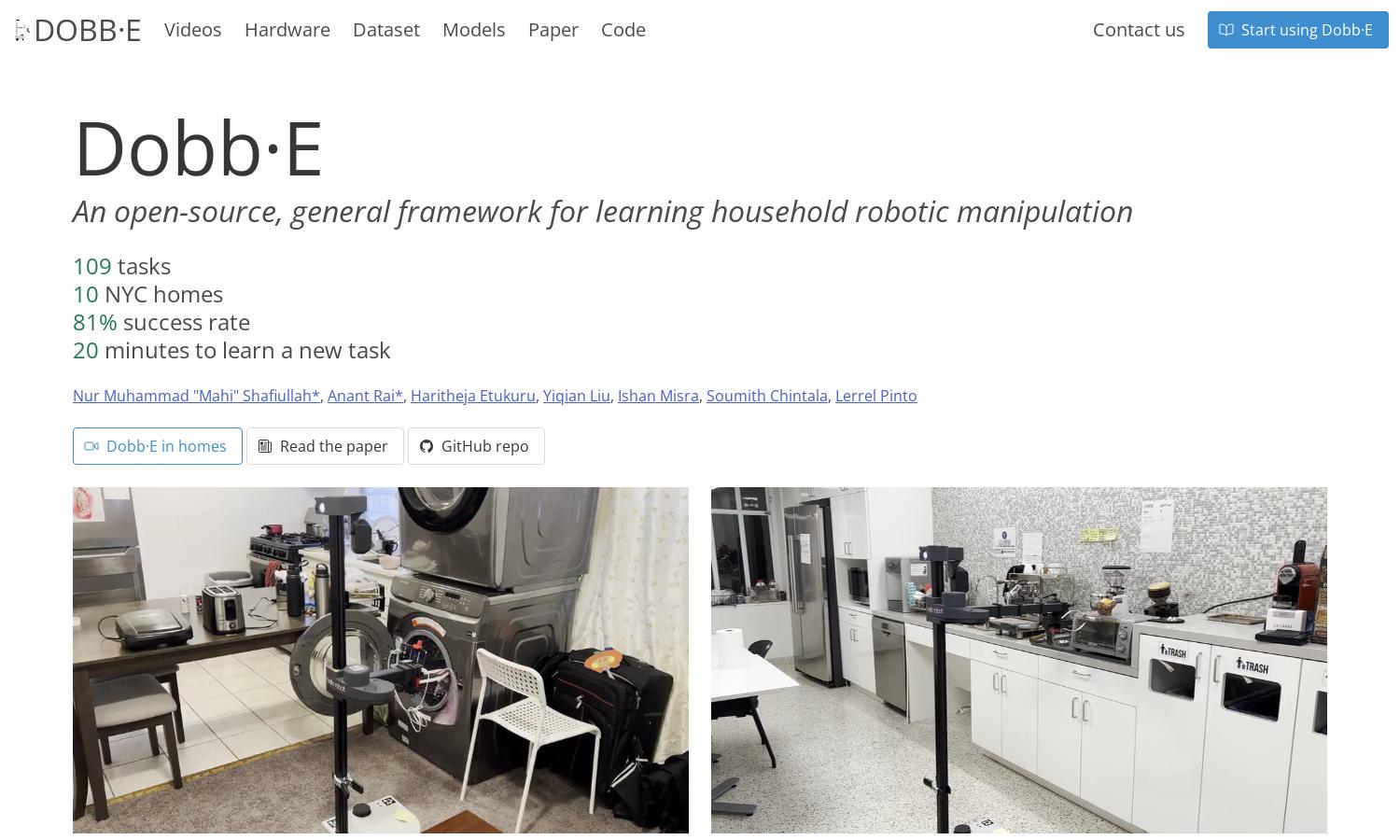
Dobb·E is an open-source framework designed to advance home robotics by enabling robots to learn household tasks through imitation learning. Users can demonstrate tasks using "The Stick," leading to fast adaptation and a high success rate. Ideal for researchers and enthusiasts in home automation.
Dobb·E offers a free, open-source framework for robotic learning with no premium tiers yet. Users can access all features including the demonstration tool and training dataset without charge, encouraging widespread adoption. Upgrading the ecosystem ultimately supports faster advancements in home robotics.
Dobb·E features an intuitive user interface designed for easy navigation through its functionalities. The layout fosters a seamless browsing experience, allowing users to easily access tutorials, datasets, and models for robotic learning, enhancing user convenience and engagement with the platform.
How Dobb·E works
Users interact with Dobb·E by first using "The Stick" tool to demonstrate household tasks, collecting data that the framework processes for imitation learning. After five minutes of demonstration, Dobb·E adapts this information to successfully execute tasks within 20 minutes, significantly simplifying robotics integration in homes.
Key Features for Dobb·E
Open-source imitation learning
Dobb·E uniquely offers an open-source imitation learning framework that empowers robots to learn household tasks quickly. This feature facilitates self-learning through simple user demonstrations, allowing for efficient adaptation to various home environments, thus enhancing everyday robotics applications.
Homes of New York (HoNY) dataset
Dobb·E utilizes the Homes of New York (HoNY) dataset, which comprises 13 hours of annotated robotic interaction data across 22 homes. This rich dataset enables comprehensive training of the Home Pretrained Representations (HPR) model, enhancing robot learning capabilities in real-world settings.
Home Pretrained Representations (HPR)
The Home Pretrained Representations (HPR) model is a key feature of Dobb·E, facilitating quick adaptation to new tasks in home robotics. Pre-trained on extensive household interaction data, HPR enhances robots' ability to understand and execute novel tasks effectively in diverse environments.
You may also like: